汇编语言一发入魂 0x0C - 解放生产力
在上一篇文章中,老李已经教大家将控制权从汇编语言转移到C 语言,但是我们的活动范围依然受限于512字节的引导扇区。今天老李就带领大家突破这512字节的限制,真正的解放生产力。
前置知识
如果你一路跟着老李走过来,那么这些前置知识你应该已经掌握了。忘记也没关系,回过头再去看看就 ok 了。
单刀直入,直接看第一个示例。
读取硬盘数据
目标
我们会构造一个1KB大小的磁盘映像文件,第一个扇区,即前512字节,保存我们的引导扇区程序,第二个扇区,即后512字节,保存一个文本文件。通过引导扇区的程序将第二个扇区的文本文件打印在显示器上。
大体上来说完成这个目标需要两个步骤。第一步,将数据从磁盘读取到内存;第二步,将数据打印到显示器上。显然,第一步需要进行磁盘的 I/O 操作,第二步则相对简单。
目录结构
$ tree .
.
├── boot.S
├── main.c
├── Makefile
├── message.data
├── mmu.h
├── types.h
└── x86.h
其中boot.S、mmu.h内容与前一篇文章相同,不再重复介绍。完整的代码戳这里。
先来看types.h。
#ifndef __TYPES_H_
#define __TYPES_H_
typedef __signed char int8_t;
typedef unsigned char uint8_t;
typedef short int16_t;
typedef unsigned short uint16_t;
typedef int int32_t;
typedef unsigned int uint32_t;
typedef long long int64_t;
typedef unsigned long long uint64_t;
#endif
我们定义了一些类型,可以让我们少打几个字。
x86.h
#include "types.h"
static inline uint8_t
inb(uint16_t port)
{
uint8_t data;
asm volatile("inb %1,%0"
: "=a"(data)
: "d"(port));
return data;
}
static inline void
outb(uint16_t port, uint8_t data)
{
asm volatile("outb %0,%1"
:
: "a"(data), "d"(port));
}
static inline void
insl(int port, void *addr, int cnt)
{
asm volatile("cld; rep insl"
: "=D"(addr), "=c"(cnt)
: "d"(port), "0"(addr), "1"(cnt)
: "memory", "cc");
}
这里我们使用内联汇编定义了三个函数,这三个函数使用static、inline修饰。static保证函数只在声明它的文件中可见,避免和其他相同名称的函数冲突。inline告诉编译器尽可能将函数内联到调用它的地方,这样可以减少函数调用次数,提高效率,但这不是必然。
inb函数内联了inb指令,用于从指定端口读取1字节数据。
outb函数内联了outb指令,用于向指定端口写入1字节数据。
insl函数内联了cld; rep insl指令,cld用于清除方向标志,使偏移量向正方向移动,这个偏移量其实就是传入的addr,会被关联到edi,反汇编的结果中可以看到,请大家自己实验。rep前缀用于重复执行insl,重复的次数由ecx决定,即传入的参数cnt。最终数据会被连续读取到addr指向的内存处。
main.c
#include "x86.h"
void readsect(void *dst, uint32_t offset);
void bootmain(void)
{
readsect((void *)0xb8000, 1);
while (1)
;
}
void waitdisk(void)
{
while ((inb(0x1F7) & 0xC0) != 0x40)
;
}
void readsect(void *dst, uint32_t offset)
{
waitdisk();
outb(0x1F2, 1);
outb(0x1F3, offset);
outb(0x1F4, offset >> 8);
outb(0x1F5, offset >> 16);
outb(0x1F6, (offset >> 24) | 0xE0);
outb(0x1F7, 0x20);
waitdisk();
insl(0x1F0, dst, 512 / 4);
}
第3行声明函数readsect,用于从磁盘读取一个扇区。参数dst指定目的内存位置,参数offset指定要读取的扇区的偏移量。我们将使用LBA模式访问磁盘,该模式从0开始编号数据块,第一个区块LBA=0,第二个区块LBA=1,以此类推。
第7行调用readsect,将偏移量为1的扇区,即第二个扇区的数据读取到内存0xb8000处。因为我们将向该扇区写入ASCII编码的文本,所以可以直接将数据读取到显存对应的内存处,以直接打印文本。
第13~17行定义函数waitdisk,采用忙等的方式等待磁盘准备好进行数据传输。端口1F7既是命令端口,又是状态端口。作为状态端口时,每一位含义如下:
- 第
7位 控制器忙碌 - 第
6位 磁盘驱动器已准备好 - 第
5位 写入错误 - 第
4位 搜索完成 - 第
3位 为1时扇区缓冲区没有准备好 - 第
2位 是否正确读取磁盘数据 - 第
1位 磁盘每转一周将此位设为1 - 第
0位 之前的命令因发生错误而结束
inb(0x1F7)从端口0x1F7读取出状态,与0xC0做&运算,只保留高两位,即第7位和第6位,如果不等于0x40(控制器不忙且已准备好交互),则继续等待、测试。
第19~33行定义函数readsect。
第21行,函数首先调用waitdisk以确保磁盘准备好交互。
第23行,向端口0x1F2写入1,指定读取的扇区数量为1。
第24~27行,向端口0x1F3、0x1F4、0x1F5、0x1F6写入28位的逻辑扇区编号,其中端口0x1F6的高四位写入0xE,表示以LBA模式访问主硬盘。
第28行,端口0x1F7做为命令端口,向其写入0x20表示请求读硬盘。
第30行,继续等待硬盘准备好数据。
第32行,调用函数insl从端口0x1F0读取数据到dst,0x1F0是数据端口。读取的次数是512 / 4,因为一个扇区包含512个字节,而insl指令一次可以读取4个字节。
message.data
H
e
l
l
o
l
a
o
l
i
!
每一个字符换一行,因为换行符的ASCII码为0a,正好等于浅绿色的字符显示属性,所以我们可以直接将其与字符一起读入显存对应的内存处,做为字符的显示属性。既可以说是偷懒,也可以说是个小技巧。因为我们的目的是演示如何使用 C 语言读写磁盘。message.data的底层内容如下:
$ xxd -a message.data
00000000: 480a 650a 6c0a 6c0a 6f0a 200a 6c0a 610a H.e.l.l.o. .l.a.
00000010: 6f0a 6c0a 690a 210a o.l.i.!.
编译链接
$ cc -m32 -c -o boot.o boot.S
$ cc -m32 -fno-builtin -fno-pic -nostdinc -c -o main.o main.c
$ ld -N -e start -Ttext=0x7c00 -m elf_i386 -o boot.elf boot.o main.o
$ objcopy -S -O binary -j .text boot.elf boot.bin
$ cp boot.bin boot
$ ./sign boot
制作磁盘映像
$ dd if=/dev/zero of=boot.img bs=512 count=2
$ dd if=boot of=boot.img conv=notrunc
$ dd if=message.data of=boot.img seek=1 conv=notrunc
运行
$ qemu-system-i386 -drive file=boot.img,format=raw -monitor stdio
结果如下:
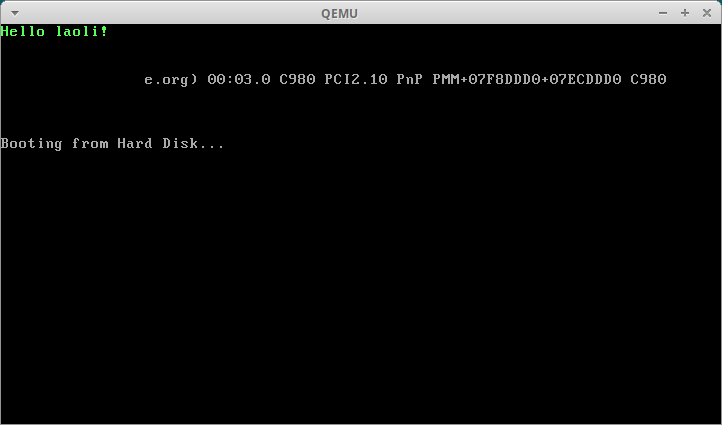
可以看到从!到e中间的部分是黑掉的。因为我们没有那么多数据,但是readsect还是会读取512个字节,而剩下的字节都是0。
加载“内核”
其实我们上一个栗子的代码已经相当于一个操作系统的bootloader了。我们从磁盘读取了一段数据并显示在屏幕上,如果我们读取一段程序并执行它呢?这可不就是一个bootloader加载内核的过程吗。你品,你细品。
接下来老李就带大家撸一个Hello world 内核加载到内存并运行起来。
目录结构
$ tree .
.
├── boot.S
├── kernel.c
├── main.c
├── Makefile
├── mmu.h
├── types.h
└── x86.h
还是挑有变化的来讲,除了main.c和kernel.c,其他内容都与之前相同。完整的代码戳这里。
main.c
#include "x86.h"
void readsect(void *dst, uint32_t offset);
void bootmain(void)
{
readsect((void *)0x10000, 1);
((void (*)(void))(0x10000))();
while (1)
;
}
void waitdisk(void)
{
while ((inb(0x1F7) & 0xC0) != 0x40)
;
}
void readsect(void *dst, uint32_t offset)
{
waitdisk();
outb(0x1F2, 1);
outb(0x1F3, offset);
outb(0x1F4, offset >> 8);
outb(0x1F5, offset >> 16);
outb(0x1F6, (offset >> 24) | 0xE0);
outb(0x1F7, 0x20);
waitdisk();
insl(0x1F0, dst, 512 / 4);
}
不同处在第7、9行。
第7行,这次我们将数据读取到了内存0x10000处。
第9行,通过强制类型转换,将0x10000处开始的内容转换成了一个函数并调用,函数的类型是void (*)(void)。如果像下面这样写可能会好理解一点:
void (*entry)(void);
entry = (void (*)(void))(0x10000);
entry();
kernel.c
#include "types.h"
void entry(void)
{
uint16_t *video_buffer = (uint16_t *)0xb8000;
for (int i = 0; i < 80 * 25; i++)
{
video_buffer[i] = (video_buffer[i] & 0xff00) | ' ';
}
video_buffer[0] = 0x0700 | 'l';
video_buffer[1] = 0x0700 | 'a';
video_buffer[2] = 0x0700 | 'o';
video_buffer[3] = 0x0700 | 'l';
video_buffer[4] = 0x0700 | 'i';
video_buffer[5] = 0x0700 | '!';
}
常规操作,清屏,打印字符,大家应该已经轻车熟路了。
编译链接
制作 bootloader
$ cc -m32 -c -o boot.o boot.S
$ cc -m32 -fno-builtin -fno-pic -nostdinc -c -o main.o main.c
$ ld -N -e start -Ttext=0x7c00 -m elf_i386 -o boot.elf boot.o main.o
$ objcopy -S -O binary -j .text boot.elf boot.bin
$ cp boot.bin boot
$ ./sign boot
制作 kernel
$ cc -m32 -fno-builtin -fno-pic -nostdinc -c -o kernel.o kernel.c
$ objcopy -S -O binary -j .text kernel.o kernel
制作磁盘映像
$ dd if=/dev/zero of=boot.img bs=512 count=2
$ dd if=boot of=boot.img conv=notrunc
$ dd if=kernel of=boot.img seek=1 conv=notrunc
运行
$ qemu-system-i386 -drive file=boot.img,format=raw -monitor stdio
结果如下:
总结
先来说一下上面所谓的“内核”潜在的一些问题。我们只是简单的从磁盘读取了512字节的数据,事实上真正的“内核”的大小是变化的,可能小于512字节,但更多的可能是大于512字节。所以我们需要将“内核”的大小写在某个地方,让bootloader知道应该读取多少扇区。
再来说一下写汇编语言这个系列的初衷,是为了开发操作系统做一些准备工作。如果只是学习操作系统的理论知识那完全可以不学习汇编语言,但如果想开发一个操作系统,那汇编语言的知识就是必不可少的。因为不可避免的要和硬件打交道,不论是x86、arm还是其它的体系结构。
到目前为止,汇编语言的基础知识已经讲的差不多了,保护模式的概念也介绍了一些,还有很多没有介绍,剩下的部分我打算结合操作系统讲解,想继续学习的小伙伴们请移步到这里。
参考MIT 6.828: Operating System Engineering。
(完)